丂丂丂丂丂丂丂丂丂丂丂丂暔棟僙儞僒偺幚尡
丂丂侾丏丂嬥懏扵抦婡 乮儌僲僐僀儖宆乯丗
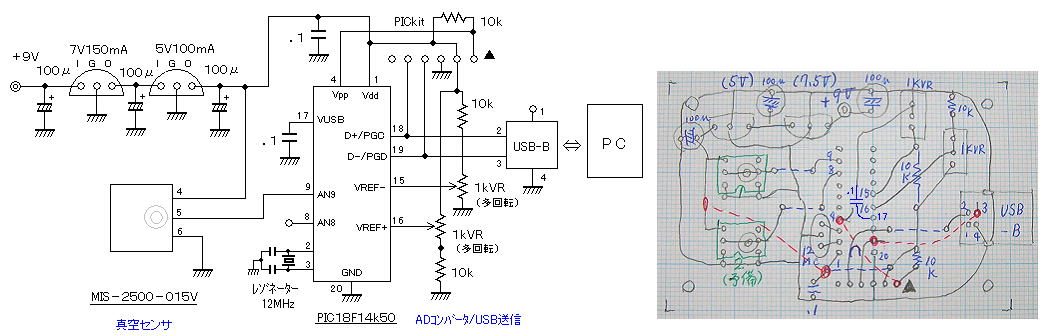
丂丂僩儔儞僕僗僞 俀愇偺娙扨側峔憿偱丄僐儖僺僢僣敪怳夞楬偵傛傞帺椼敪怳夞楬偱
俁侽侽倠俫倸掱搙偺廃攇悢偺揹帴攇傪僐僀儖偐傜報壛偟丄偦偺斀幩攇偵傛傞揹埑偺尭悐傪専弌偡傞丅
敪怳丒専弌僐僀儖偼憲庴怣寭梡偱丄冇侽丏俇倣倣億儕僂儗僞儞慄傪 冇俇俆倣倣偵 俀俆俿倳倰値 枾姫偒乮俴佮俉侽兪俫乯乮丒丒丒嶦拵嵻偺僇儞偵姫偒偮偗傞乯偵偟偰丄専弌斅偵屌掕偟偨丅
丂丂僟僀僆乕僪偱専攇偟偨偽偐傝偺揹埑乮倎揰丄悢侾侽侽倣倁乯偼晄埨掕側偺偱丄俿倰俀 偱 俢俠憹暆偟偰 悢倁掱搙偺埨掕偟偨揹埑偵偡傞丅 敪怳晹偺俆倠兌倁俼偲丄僐儞僷儗乕僞偺婎弨揹埑傪寛傔傞侾侽倠兌倁俼乮懡夞揮乯傪偦傟偧傟挷惍偟偰丄
倐揰丗 V倐亖俀丏侾倁丄 們揰丗 倁們亖俀丏侽倁 偵側傞傛偆偵偟偨丅 乮彮偟 僆儁傾儞僾偺儅僀僫僗懁偑崅偄忬懺乯
丂丂偙偙偱丄僐僀儖傪摫懱偵嬤偯偗傞偲丄嬥懏摫懱偐傜偺斀帴応偵傛傝慡懱偺僀儞僟僋僞儞僗乮俴乯偑壓偑傝丄敪怳廃攇悢乮 倖 乯偼忋偑傝丄偦偺寢壥 倐揰 偺揹埑乮倁倐乯偼壓偑傝丄斀揮僐儞僷儗乕僞偵傛傝 弌椡揹埑ON 偵側傞丅 僆儁傾儞僾偵偼 崅弌椡僆儁傾儞僾 係俆俆俇俙俢乮俬倧倣倎倶亖俈侽倣俙乯傪梡偄偰丄揹巕僽僓乕乮俆倁丄冇侾俀倣倣丄倣倎倶俁侽倣俙乯偑廫暘柭傞傛偆偵偟偨丅
乮斈梡僆儁傾儞僾偺 俴俵俁俆俉俶 偱傕堦墳壜擻偩偭偨丅丂僽僓乕偑偆傞偝偄偺偱僽僓乕傪愗傞僗僀僢僠傪擖傟偨丅乯
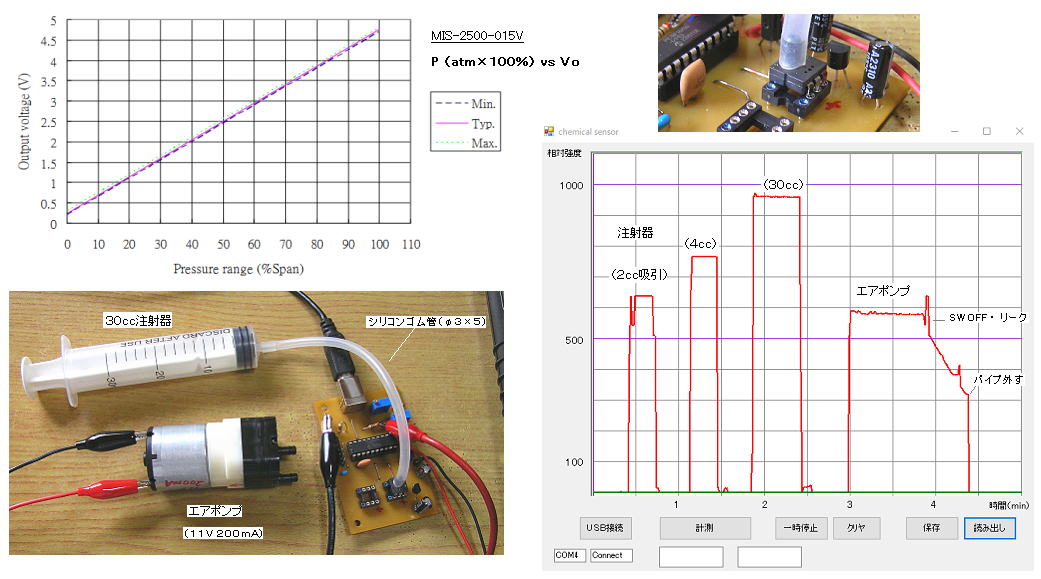
丂丂乮寢壥乯丂丒丂傾儖儈斅丄摵斅側偳偺旕帴惈嬥懏偵偼傛偔斀墳偟偰丄尦偺敪怳廃攇 俁侽侽倠俫倸偐傜忋徃偟偰丄丂倲亖侾倣倣俙倢斅丒愙怗丗 倖亖係俉侽倠俫倸乮倖揰乯丄 僾儕儞僩惗婎斅乮俠倳敁丒俁俆兪倣乯丒愙怗丗 倖亖 係俆侽倠俫倸 側偳偲側偭偨丅丂仺丂倁倐 乮倐揰乯 偼壓偑傝丄斀揮僐儞僷儗乕僞偵傛傝 俴俤俢偑揰摂偟丄僽僓乕偑柭傞丅
丂丂丂丂丒丂倲亖侽丏俆倣倣偺揝斅偱偼丄偙偺廃攇悢偼廫暘崅偄偺偱 摫懱偲偟偰傆傞傑偄丄倖亖 係侾侽倠俫倸偲側偭偨丅丂乮悢倠俫倸埲壓偵偡傞偲丄帴惈懱偲偟偰傆傞傑偄丄廃攇悢偼壓偑傞偲峫偊傜傟傞丅乯
丂丂丂丂丒丂媡偵丄擃帴惈懱偱揹婥掞峈偺崅偄 僼僃儔僀僩偱偼丄乮俴俤俢偑偮偔忬懺偵挷惍偟偰乯俴俤俢偼徚摂偲側偭偨丅
俵値亅倅値僼僃儔僀僩乮乣侾侽侽倠俫倸乯丗 俀俈侽倠俫倸丄 仈俈俈嵽乮乣侾侽俵俫倸乯丗
俀俋侽倠俫倸丅
丂丂丂丂丒丂奺暔幙偱偼丄丂崟墧斅丗 LED揰摂丄丂崟墧暣丗 庛偔揰摂丄丂僔儕僐儞夠丗
偮偐側偄丄丂僎儖儅僯僂儉丗 偮偐側偄丄丂僸慺乮嬥懏僸慺乯丗 揰摂丄丂丂僫僩儕僂儉丄儅僌僱僔僂儉丄僀儞僕僂儉丄僠僞儞乮斅乯丄僗僘丄價僗儅僗丄悈嬧丄嬥敁乮愊憌乯丄側偳偺嬥懏椶偼偡傋偰揰摂
乮梕婍偺奜偐傜乯丄丂傾儖儈旝暡枛丗 偮偐側偄
丂丂仏丂幚嵺偺岺応摍偱偺巊梡乮揝丒旕揝嬥懏堎暔摍偺彍嫀乯偵偼丄憲怣僐僀儖偲庴怣僐僀儖偲傪暘偗丄偦偺娫偵昳暔傪僐儞儀傾摍偱捠傜偣偰専弌偡傞丅 揝偵偼掅廃攇梡乮V忋偑傞乯丄旕帴惈嬥懏偵偼崅廃攇梡乮V壓偑傞乯偺丄偦傟偧傟敪怣僐僀儖偲
庴怣僐僀儖傪梡偄傞丅乮僐僀儖係偮乯
丂丂仏仏丂僨傿僢僾儊乕僞乕偺尨棟乮壓偺曽乯偲摨條偵丄場壥棩偵娭偡傞戝偒側撲偑偙偙偵傕偁傞丅 専懱偲偺揹帴婥揑寢崌偑偁傞応崌丄偦傟傕廃攇悢傪寛傔傞僷儔儊乕僞乕偵娷傑傟丄偟偐傕偦偺寢崌偑挻岝懍丄偐偮丄墦妘揑偵乮亖旕場壥棩揑偵乯峴側傢傟傞偲
峫偊傜傟傞丅
丂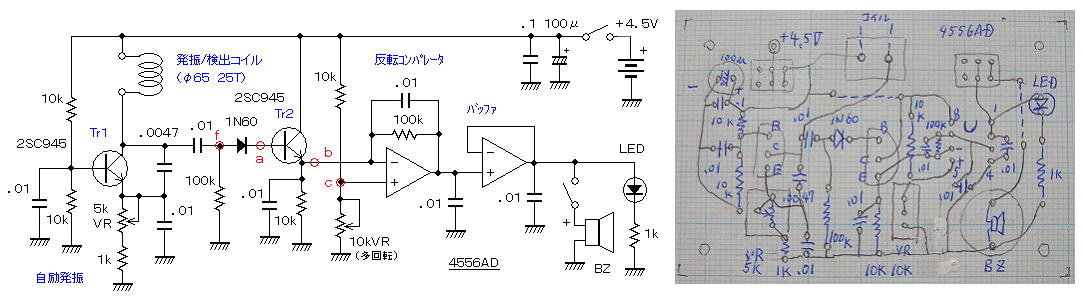
丂丂丂丂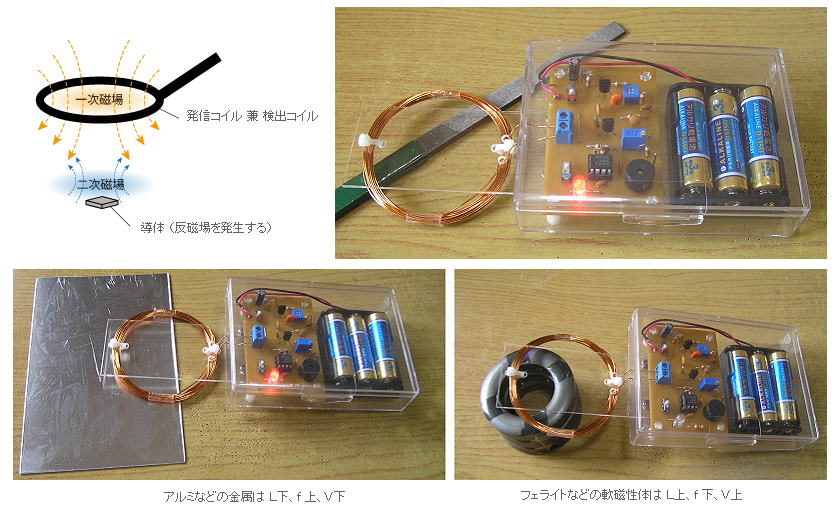
丂丂俀丏丂挻壒攇嫍棧寁 丗
丂丂侾侽擭傎偳慜偼丄挻壒攇敪怳婍晹暘偟偐側偐偭偨偺偱丄傾僫儘僌夞楬傕娷傔
堦偐傜巒傔偰嫍棧寁傪嶌偭偰偄偨丅丂崱偼偢偭偲嶌傝傗偡偔側偭偰偍傝丄挻壒攇嫍棧僙儞僒丒儌僕儏乕儖
HC-SR侽係乮廐寧丄拞崙惢丄丂揹尮俁亅俆丏俆倁丄俁倣俙丄弌椡挻壒攇係侽倠俫倸亊俉攇丄應掕壜擻嫍棧
俁侽乣係俆侽侽倣倣乯傪梡偄偰 挻壒攇嫍棧寁傪嶌傞偙偲偑偱偒傞丅丂HC-SR侽係偼丄GPIO儌乕僪乮婎斅偺掞峈丗R4/NC丄R5/NC
偺僨僼僅儖僩丄丂崱夞偙傟傪巊偆乯偲丄UART儌乕僪乮R4/NC丄R5/侾侽倠兌乯丄俬2俠儌乕僪乮R4/侾侽倠兌丄R5/NC乯偺俁儌乕僪傪慖戰偡傞帠偑偱偒傞丅
曗惓側偳偣偢偦偺傑傑巊偄偨偗傟偽丄UART傗I2C偺捠怣儌乕僪偵偟偰巊偆偙偲偵側傞丅
丂丂GPIO儌乕僪偱偼丄丂T乮僩儕僈乯抂巕偵 暆侾侽兪S偺僩儕僈僷儖僗傪憲傞偲丄儌僕儏乕儖撪晹偱寁嶼偟丄俤乮僄僐乕乯抂巕偐傜 旕應掕暔傑偱偺偐偐偭偨墲暅偺帪娫挿偝偺僷儖僗乮俆倁丄俁丏俁倁婡婍偵懳墳偱偒傞傛偆偵丄栺俁丏俀倁偱丅 倣倎倶俉侽倣俽乯傪曉偟偰偔傞偺偱丄偙傟傪儅僀僐儞摍偺僨僕僞儖抂巕偱庴偗丄寁嶼偟
弌椡偡傞丅
丂丂僩儕僈傪憲傞曽偼栤戣側偄偑丄僄僐乕傪庴偗庢傞懁偱偼丄愒奜慄庴怣婍偺傛偆偵丂倂倛倝倢倕暥傪梡偄偰丄
While(IN) 乮IN偑ON偵側傞傑偱懸偮乯丂TMR1L = 0; TMR1H = 0;乮僞僀儅傪僛儘僋儕儎乯丂While(IN
== 0)乮IN偑OFF偵側傞傑偱懸偮乯 TL=TMR1L; TH=TMR1H; 僞僀儅侾僆乕僶乕僼儘乕丒僼儔僌==
1丂偵側偭偨傜 A = 1;乮僉儍僾僠儍乯丂摍偲偡傞偲丄 怣崋偑棃側偄偲丄偁傞偄偼搑愗傟傞偲丄偄偮傑偱傕懸偪忬懺偵側偭偰巭傑偭偰偟傑偆丄偲偄偆栤戣偑偁傞丅
丂丂偦偙偱丄儔僼側怣崋偱傕張棟偱偒丄儔僕僐儞摍偱傕梡偄傜傟傞丄僒儞僾儕儞僌曽幃偲偡傞丅乮嶲峫丗俁係丏僆儁傾儞僾僼傿儖僞乕偺壓偺曽乯丂栺侾侽兪S崗傒偱 侾侽侽侽侽夞 僒儞僾儕儞僌乮亖栺侾侽侽倣俽乯偟丄俷俶偵側偭偨夞悢 値 傪僇僂儞僩偟偰丄壒懍乮嬻婥丄俀侽亷乯 亖 俁係俁乮倣/俽乯偲偟偰丄
丂丂丂丂丂侽丏侽侾乮倣S乯 亊 値乮夞乯 亊 俁係俁乮倣倣/倣俽乯 亐 俀乮墲暅暘乯丂亖丂侾丏俈侾俆 丒 値 乮倣倣丄曅摴嫍棧乯
丂丂偙傟傪儅僀僐儞偵彂偒崬傒 堦搙嶌惉偟偰丄丂師偵丄抁偄崗傒側偺偱丄PIC撪偱抶傟岆嵎偑惗偠傞偨傔丄幚應偟偰乮俁侽們倣偺掕婯傪暻偵摉偰偨應掕抣丗丂俁侽侽倣倣偱
俀俆俇倣倣偲昞帵偟偨乯丄
丂丂丂丂丂亪丂丂侾丏俈侾俆亊乮俁侽侽/俀俆俇乯 丒 値丂亖丂俀丏侽侾侽 丒 値
偺傛偆偵曗惓偡傞丅 彫悢揰傪娷傓寁嶼側偺偱丄曄悢傪 倓倧倳倐倢倕 偵宆曄姺偟偰 寁嶼偟偨丅乮嶲峫丗俀俈丏L儊乕僞夞楬乯丂乮仏丂倢倧値倗 宆惍悢抣偵偼 嵟屻偵 俴 傪晅偗傞乮12345678L 側偳乯乯
丂丂丒丂俁們倣乣係俆侽們倣傑偱偺應掕斖埻側偺偱丄偦傟埲奜偺抣偱偼 乽俤倰倰倧倰乿偺昞帵偲偟偨丅
丂丂丒丂傑偨丄妱崬傒僗僀僢僠傪愝偗丄儃僞儞傪墴偡偲 應掕抣偺昞帵偑屌掕偝傟傞傛偆偵偟偨丅
丂丂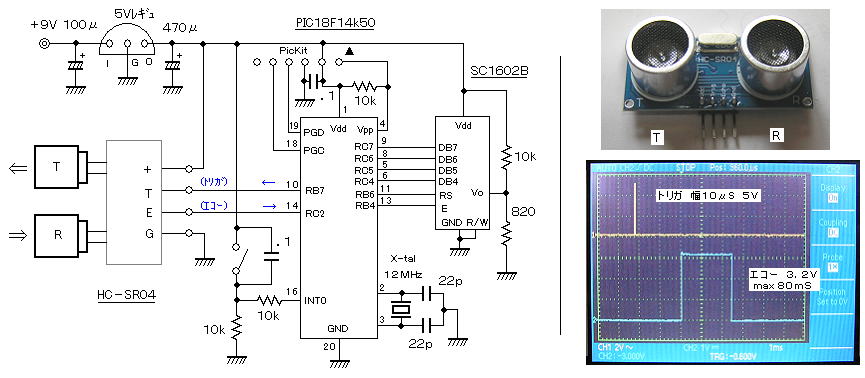
丂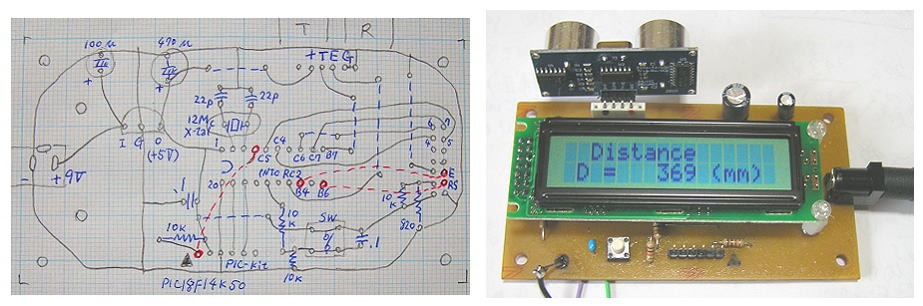
丂丂丂丂丂丂丂丂丂俹俬俠僾儘僌儔儉乮PIC18F14K50乯
丂丂俁丏丂尭埑乮恀嬻乯僙儞僒丗
丂丂俆V揹尮偱丄忢埑偐傜恀嬻傑偱 捈慄惈偺椙偄僨乕僞偑岞奐偝傟偰偄傞丄MIS亅俀俆侽侽亅侽侾俆V 乮乣 亅侾侽侽侽HPa丄俆V丄俀倣A乯傪梡偄偰丄恀嬻寁傪嶌傞丅 傾僫儘僌僨乕僞傪庴偗偰 僷僜僐儞偵USB偱憲傝 揹埑寁昞帵偲偡傞偨傔偵丄PIC侾俉俥侾係倠俆侽 傪梡偄偨丅 乮仏丂PIC侾俉俥侾係倠俆侽偵偼 俙俢曄姺偑偆傑偔偄偐側偄傕偺傕崿偠偭偰偄傞偺偱
拲堄偑昁梫乯
丂丂丒丂俹乮倎倲倣亊侾侽侽亾乯 倴倱丏 倁倧乮弌椡揹埑乯 偺僌儔僼傛傝丄埑椡(晧埑乯傪怳偭偰丄偦傟偧傟偺揹埑傪應掕偟丄俹俬俠偺 倁倰倕倖亅 偱掅揹埑懁丄 倁倰倕倖亄 偱崅揹埑懁偺挷惍傪峴側偆丅
丂丂丒丂僙儞僒傊偺愙懕偼丄侾侽們倣掱搙偺 冇俁倣倣亊冇俆倣倣偺 僔儕僐儞僑儉娗傪梡偄偨丅
媧堷偼丄俁侽們們偺戝宆拲幩婍偲丄僄傾億儞僾乮侾侾倁嬱摦丒俀侽侽倣俙乯偱峴側偭偨丅
丂丂丒丂僙儞僒偺暆偑 捠忢偺DIP俉倫摍偺俬俠偺暆傛傝傕峀偄偺偱拲堄丅 昅幰偼捠忢偺俉倫僜働僢僩乮娵僺儞乯傪婎斅偵晅偗偰
偦傟偵曅懁偩偗傪嵎偟崬傫偩乮斀懳懁偼俶俠乯偑丄婎斅偺寠偺暆傪峀偔偟偰捈愙僴儞僟晅偗傪偟偰傕椙偄丅
丂丂乮應掕丒挷惍乯
|
僙儞僒倁倧乮倁乯 |
侽亅侾侽侽侽栚惙傝 |
倁倰倕倖亅丄倁倰倕倖亄 |
| 拲幩婍丂侽們們乮忢埑乯 |
丂丂侽丏俀係 |
丂丂丂丂丂丂侽 |
亅丗侽丏俁俈倁丄亄丗俆丏侽倁 |
| 拲幩婍丂俀們們/俁侽們們 |
丂丂俀丏俇俈 |
丂丂丂丂俇係侽 |
|
| 拲幩婍丂係們們/俁侽們們 |
丂丂俁丏俇侾 |
丂丂丂丂俈俈侽 |
|
| 拲幩婍俁侽們們/俁侽們們 |
丂丂係丏俇俀 |
丂丂丂丂俋俈侽 |
|
| 僄傾億儞僾 |
丂丂俀丏俋侽 |
丂丂丂丂俇俉侽 |
|
丂丂乮寢壥乯丂倁倰倕倖亅乮忢埑乯偼栤戣側偄偑丄倁倰倕倖亄偼 傎傏揹尮揹埑乮俆V乯偵偟偰傕挷惍斖埻傪彮偟挻偊偰丄俹俠僌儔僼乮倣倎倶侾侽侽侽乯偵惓妋偵偼廂傑傜側偐偭偨丅乮PIC偺AD僐儞僶乕僞乕偱侾侽俀係暘妱偺偨傔乯丂傎傫偺彮偟偺嵎偱偁傞偑丄惓妋偵偡傞偵偼丄俀丏偲摨條偵丄倓倧倳倐倢倕 偵偟偰悢抣寁嶼偟偰弌偡偟偐側偄偲巚傢傟傞丅乮亊侾侽侽侽/侾侽俀係 亖 侽丏俋俈俇俇乯
丂丂偦偙偱丄PIC僾儘僌儔儉偵 曗惓寁嶼傪擖傟丄Vref亅丄Vref亄偼巇條彂偺僌儔僼偺捠傝丄偦傟偧傟 栺侽丏俀俆V丄 栺係丏俈俆V偵栠偟偨丅
丂丂丂丂丂丂PIC僾儘僌儔儉乮PIC18F14K50)乮曗惓嵪傒乯丂丂倢倝倐丵倎倓們丄丂丂丂丂丂俹俠僾儘僌儔儉乮VB2010乯丂丂丂僌儔僼傿僢僋丂丂丂儌僕儏乕儖
丂丂丂丂丂丂PC僾儘僌儔儉丗 Chemical sensor 丏倕倶倕 僼傽僀儖丂丒丒丒丂倁俛俀侽侾侽偱嶌傟側偐偭偨応崌 僟僂儞儘乕僪
丂丂係丏丂GPS 儘僈乕丗
丂丂慜夞丄GPS儌僕儏乕儖 GM-316乮戜榩惢乯 偵傛傞 俁俁丏GPS儘僈乕傪嶌惉偟偨偑丄崱夞偼丄偝傜偵姶搙偺椙偄GPS儘僈乕丒僉僢僩乮廐寧丄GYSFD MAXB 乮乽傒偪傃偒乿懳墳丄懢梲桿揹乯傪梡偄偰丄摨偠傛偆側夞楬偱丄俹俬俠俀係俥俰俇係俧俛侽侽俀 乮俁丏俁倁丄侾俇倐倝倲乯丄俽俛侾俇侽俀俛倂
乮俬2俠丒傾僀僐儞昞帵晅偒丒俁丏俁倁俴俠俢丒僶僢僋儔僀僩晅偒丄侥弁挢柏暖附乯丄俽俢僇乕僪乮僗僞儞僟乕僪乯傪梡偄偰嶌惉偟偨丅
丂丂仠丂姶搙斾妑丗丂丂GYSFD MAXB 丂丒丒丒丂廂廤帪乮捛旜乯丗丂亅侾俇係倓俛倣丄丂曔懆帪丗丂亅侾俇侾倓俛倣丄丂應埵惛搙丗丂俀倣
丂丂丂丂丂丂丂丂丂們倖丏丂丂俧俵亅俁侾俇丂丒丒丒丂廂廤帪丗丂亅侾係俀倓俛倣丄丂曔懆帪丗丂亅侾俆俋倓俛倣丄丂應埵惛搙丗丂俀丏俆倣
丂丂丂丂丂丂丂丂丂丂丂丂丂俧俹俽亅俆係宆丂丒丒丒丂廂廤帪丗丂亅侾係俀倓俛倣丄丂曔懆帪丗丂亅侾俁係倓俛倣丄丂應埵惛搙丗丂侾俆倣
偱偁傝丄GYSFD MAXB偑 偐側傝姶搙偑椙偔丄傛傝幚梡揑 偲偄偆偙偲偵側傞丅丂幚嵺丄揹尮乮亄係丏俆V乯傪擖傟偰傒傞偲丄栘憿壠偺2奒偐傜
僐乕儖僪僗僞乕僩偱 30昩偐傜1暘偔傜偄偱 俉乣11屄偺塹惎傪懆偊偨丅乮GM-316偼悢暘偱
俇乣俉屄乯丂乮宱搙丒堒搙丄帪娫偼OK丅丂偨偩偟丄崅搙偺惛搙偼丄暯抧偱偼憡曄傢傜偢椙偔側偄丅乯
丂丂仠丂GYSFD MAXB 傕傑偨丄僔儕傾儖偱憲丒庴怣偡傞偑丄僨僼僅儖僩偱丄捠怣懍搙偑 俋俇侽侽倐倫倱 偱偁傞偲偙傠偑桞堦堎側傞丅 偙偺偨傔丄弶婜壔娭悢偺 UART侾偺弶婜愝掕偼丄丂倀侾俛俼俧 亖 侾侽俁丟丂偵曄峏偟偨丅 乮們倖丏丂俧俵亅俁侾俇偱偼丄係俉侽侽倐倫倱丄倀侾俛俼俧亖俀侽俈丟 偩偭偨丅乯
丂丂丒丂庴怣儊僢僙乕僕乮NMEA僼僅乕儅僢僩乯偼丄侾S偛偲丄僔儕傾儖俋俇侽侽倐倫倱丄俉價僢僩偱丄丂亹俧俹俧俧俙丄 亹俧俹俧俴俴丄 亹俧俹俧俽俙丄 亹俧俹俧俽倁丄亹俧俹俼俵俠丄 亹俧俹倁俿俧丄 亹俧俹倅俢俙丂偺弴偵側傝丄 俧俵亖俁侾俇偑丂亹俧俹俧俧俙丄 亹GPGSA丄 亹GPGSV丄 亹GPRMC丄 亹GPVTG丂偱偁傞偺偵懳偟丄俀僌儖乕僾懡偄丅丂摨條偵丄偡傋偰偺僨乕僞傪俼俙俵偵堦帪曐懚偡傞偑丄俽俢僇乕僪儊儌儕偵偼丄抧恾僜僼僩偺僇僔儈乕儖俁俢摍偵昁梫側俧俹俧俧俙偺堦晹偩偗傪婰榐偡傞偺偱 栤戣側偄丅丂乮曄傢傜偢乯
丂丂仠丂婰榐帪娫娫妘偼丄侾侽昩偲偟偨丅丂乮曄傢傜偢乯
丂丂丒丂帪娫昞帵傕 GM-316 偲摨條偵丄俋帪娫懌偟偰 擔杮帪娫偲偡傞丅丂乮曄傢傜偢乯
丂丂丒丂USB偵偮側偘傞偲丄V乚倐倳倱乮侾俆倫倝値乯偑ON偵側傝USB乚MSD僋儔僗偑惉棫偟偰丄SD僇乕僪偺拞恎傪昞帵偟 僷僜僐儞偑帺暘偺儕儉乕僶僽儖僨傿僗僋偲敾抐偟偰摦嶌偡傞丅
曇廤傗婰榐丒徚嫀傕PC偱峴側偆丅丂乮曄傢傜偢乯
丂丂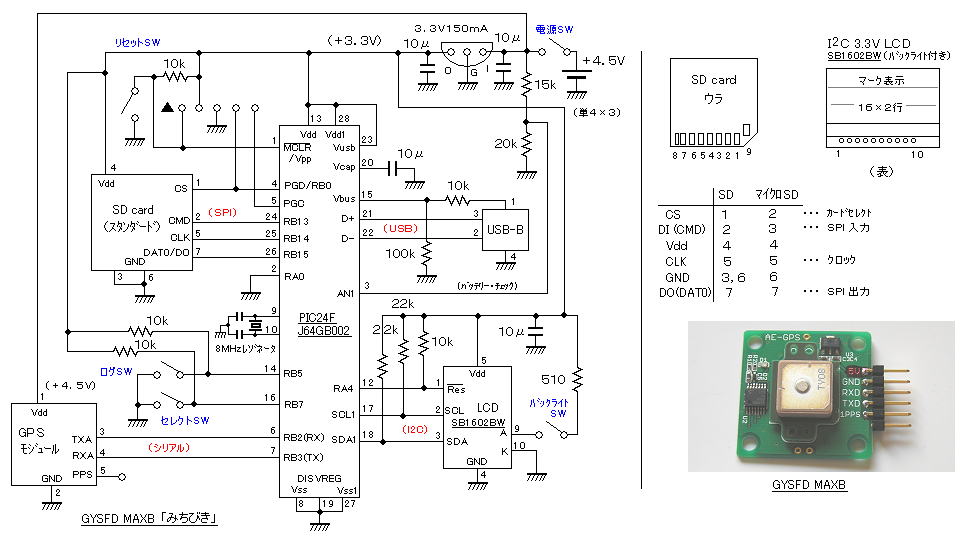
丂丂丂丂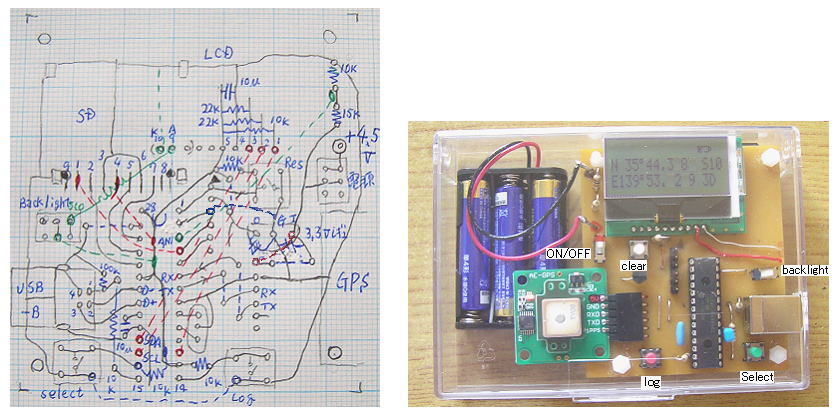
丂丂丂丂丂丂丂丂PIC僾儘僌儔儉乮PIC24FJ64GB002丄丏倛倕倶 僼傽僀儖乯丂乮儊儌挔偵揬偭偰梡偄傞乯丂丂乮僾儘僌儔儉偺徻嵶偼 俁俁丏GPS儘僈乕丂嶲徠乯
丂丂乮抧恾忋昞帵乯
丂丂仠丂抧恾僜僼僩偺僇僔儈乕儖俁D偼丄乽僿儖僾乿丄乽嵟怴忣曬昞帵乿偐傜丄乽婎杮僼儕乕乿偵傾僢僾僌儗乕僪偟丄乮崙搚乯抧棟堾抧恾乮崅搙僨乕僞側偟乯傗峲嬻幨恀丄嶳妜抧恾側偳偵愗傝懼偊偰偺昞帵偑偱偒傞傛偆偵側偭偨丅
丂丂丒丂僇僔儈乕儖俁俢偱懳墳偱偒傞 俠俽倁宍幃偼丄師偺僼僅乕儅僢僩偱梌偊傜傟傞丅 奺崁栚偺娫偵偼 僇儞儅乮,乯傪擖傟傞丅丂壓偺妵屖偺暥帤傗寘悢偺懌傝側偄悢抣偼柍偔偰傕傛偄丅乭柤徧乭偼丄晅偗傞偲
抧恾忋偱僂僄僀億僀儞僩傪昞帵偡傞嵺丄墶偵偦偺柤徧傪晅偗傞偙偲偑偱偒傞丅丂儖乕僩丄僩儔僢僋偵偼
僿僢僟傪晅偗傞丅
丂丂傑偨丄僂僄僀億僀儞僩丄儖乕僩丄僩儔僢僋偺 偄偢傟偐堦偮偺僨乕僞偑偁傟偽丄僜僼僩撪偺丂曇廤丂仺丂僨乕僞僄僨傿僞丂偺憖嶌偱
屳偄偵曄姺壜擻偱昞帵偝傟傞丅
丂丂丒丂僂僃僀億僀儞僩丗丂丂傾僢僾僌儗乕僪偺寢壥丄宱搙丄堒搙偺昞帵偼丂倓倓亱乮 倓倓倓亱乯丂倣倣亴 倱倱丏倱亶乮倓倓倓丏倣倣倱倱乯偱傕丄倓倓倓丏倓倓倓倓 偱傕丄偳偪傜偱傕椙偔側偭偨丅丂乮 ,丂偲丂,丂偺娫偵丄乭柤徧乭丄乭擔晅乭僨乕僞偑柍偗傟偽丄
偦偺傑傑偱椙偄乯
丂丂丂丂乮椺乯丂丂W1,,35.44660,138.28082,56.8,,15:12:56, 丂側偳丂
丂丂仠丂僇僔儈乕儖俁俢偺乽俧俹俽墳梡曇乿偺俢倁俢傪俹俠偵擖傟偰丄儊僯儏乕偐傜
乽娭楢忣曬傪撉傓乿丄乽僾儔僌僀儞偺愢柧偲僀儞僗僩乕儖乿傪僋儕僢僋偟丄乽俧俹俽僼傽僀儖僣乕儖 僾儔僌僀儞乿傪慖傃僀儞僗僩乕儖偡傞丅
丂丂仠丂師偵丄僇僔儈乕儖俁俢偺僜僼僩傪奐偒丄丂僣乕儖丂仺丂俧俹俽僼傽僀儖僣乕儖丂仺丂俠俽倁宍幃偐傜撉傒崬傒丂偱丄僂僄僀億僀儞僩偑偦偺傑傑抧恾忋偵昞帵偝傟傞丅 傑偨丄曇廤丂仺丂俧俹俽僨乕僞曇廤丂仺丂曄姺丂偱 儖乕僩丄僩儔僢僋偵曄姺偱偒傞丅
丂丂丂丂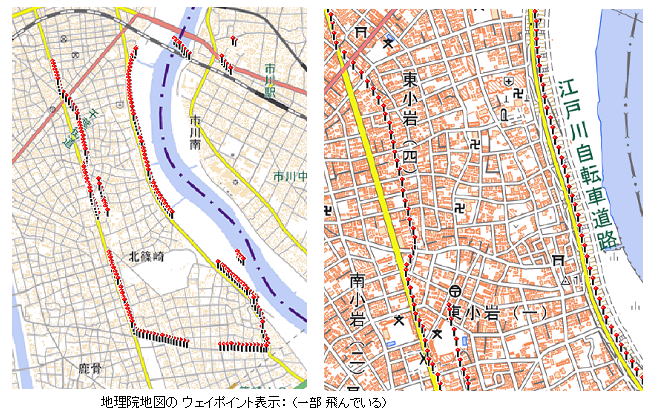
丂丂仏丂壗夞偐應掕偟偰丄傎傏摨偠嬫娫偱旘傇偺偱丄偦偺抧堟偵 実懷拞宲嬊側偳偺廃攇悢偺嬤偄揹攇尮偑偁傞傕偺偲巚傢傟傞丅
偦偺懠偺応強偱偼 悢倣偺岆嵎偱埵抲傪懆偊偰偄傞丅乮GPS儌僕儏乕儖丒GYSFD MAXB偺庴怣廃攇悢偼丄侾丏俆俈俆GH倸乮L1攇乯丅丂GPS塹惎偼丄L1攇乮1575.42MHz乯傗L2攇乮1227.60MHz乯丄L5攇乮1176.45MHz乯側偳偺暋悢偺廃攇悢傪敪怣乯
丂丂丂丂丂仒丂丂僲傾偺敔廙偺 挷嵏丗
丂丂乽嬥懏扵抦婡乿偼丄摽愳偺杽憼嬥傪扵偡偨傔偱偼側偔乮丠乯丄嬻峘偺壸暔専嵏丄晄敪抏傗抧棆偺揚嫀丄峼柆偺扵嵏側偳偵丄傑偨岺応偱偼嬥懏堎暔偺専弌丒彍嫀偵丄栶偵棫偭偰偄傑偡丅
丂丂侾俋俈俉擭丄僩儖僐惣晹偵婲偙偭偨抧恔偵傛偭偰丄傾儔儔僩嶳傪娷傓嶳抧乮乽傾儔儔僩偺嶳乆乮暋悢乯乿乮憂悽婰俉丗係乯乯偺僀儔儞婑傝偺偁傞抧堟偱偼丄僲傾偺敔廙偲巚傢傟傞堚愓偺廃傝偺抧斦偑捑壓偟丄廙偺懁柺偺榏嵽晹暘偑弌偰偒偨偺傪丄傾儊儕僇偺挷嵏僠乕儉偑敪尒偟丄俀係夞傕挷嵏偑峴傢傟傑偟偨丅丂拰偲椑偺峔憿丄墶寠傪奐偗偨強偐傜偺栘曅傗擫壢偺摦暔偺栄側偳偺丄僲傾偺敔廙傪摿挜晅偗傞傕偺偑師乆偲柧傜偐偵側偭偰偄偒傑偟偨丅
乮尰嵼偼僩儖僐惌晎偺娗棟壓偵偁傝傑偡丅乯
丂丂偦偺嵺丄嬥懏扵抦婡乮俀僐僀儖幃乯偑梡偄傜傟丄拰側偳偵晅偄偰偄傞懡偔偺嬥懏惢偺儕儀僢僩偑敪尒偝傟傑偟偨丅 偙偺儕儀僢僩偼丄傾儖儈僯僂儉傗僠僞儞丄儅僌僱僔僂儉傪娷傓乽傾儖儈惵摵惢乿偱丄僲傾偺峖悈埲慜偺悽奅偱偡偱偵丄崅搙側寉嬥懏偺揹夝惛楤媄弍偑偁偭偨偙偲偑柧傜偐偵偝傟傑偟偨丅 嬥懏惛楤媄弍偼 僩僶儖丒僇僀儞偵傛偭偰巒傔傜傟偨偲彂偄偰偁傝傑偡丅乮憂悽婰係丗俀俀乯
丂丂乽僲傾偺峖悈乿偑偁偭偨偙偲偼帠幚偱偁傝丄惞彂偺婰弎偑惓偟偄偙偲偑棤晅偗傜傟偨偺偱偡両
丂丂丂丂丂丂丂丂丂丂僲傾偺敔廙偺敪尒丂丂丂丂丂丂丂丂惞彂娭楢偺DNA傑偲傔
丂
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂栠傞丂丂丂丂丂丂丂丂丂丂丂僩僢僾傊栠傞